|
I am a PhD student at MIT Media Lab in Cambridge, MA working with Prof. Ramesh Raskar in the Camera Culture group. My research is currently supported by the NSF Graduate Research Fellowship. I previously graduated from UCLA Electrical Engineering in 2021, where I worked with Prof. Diana Huffaker on semiconductor nanowire photodetectors and Prof. Achuta Kadambi on computational camera design. Email / CV / Google Scholar / Twitter / Github |

|
|
My goal is to enable new vision capabilities by designing sensing systems that perceive the world differently from the human eye. My current interests are in single-photon and time-of-flight imaging. My research has covered applications in 3D vision, low-light, high-speed, and non-line-of-sight imaging. Selected papers are highlighted. |
|
Siddharth Somasundaram, Aaron Young, Akshat Dave, Adithya Pediredla, Ramesh Raskar Under Review [project page] [code] Practical non-line-of-sight imaging using off-the-shelf consumer LiDAR hardware. |
|
|
Tzofi Klinghoffer, Siddharth Somasundaram*, Xiaoyu Xiang*, Yuchen Fan, Christian Richardt, Akshat Dave, Ramesh Raskar, Rakesh Ranjan SIGGRAPH Asia 2025 (Conference Track) [project page] [paper] Data-driven shape and material recovery under complex time-resolved light transport. |
|
Manasi Muglikar, Siddharth Somasundaram, Akshat Dave, Edoardo Charbon, Ramesh Raskar, Davide Scaramuzza IEEE TPAMI 2025 [paper] Sensor fusion approach for high-speed, low-light imaging. |
|
Nikhil Behari, Aaron Young, Siddharth Somasundaram, Tzofi Klinghoffer, Akshat Dave, Ramesh Raskar CVPR 2025 (Highlight) [project page] [video] [code] [data] [paper] Sensor fusion approach for 3D reconstruction of textureless surfaces in low-light. |
 
|
Tsung-Han Lin, Connor Henley, Siddharth Somasundaram, Akshat Dave, Moshe Laifenfeld, Ramesh Raskar ICCP 2024 [project page] [paper] Mapping specular surfaces using natural handheld motion of consumer-gradeLiDAR. |

|
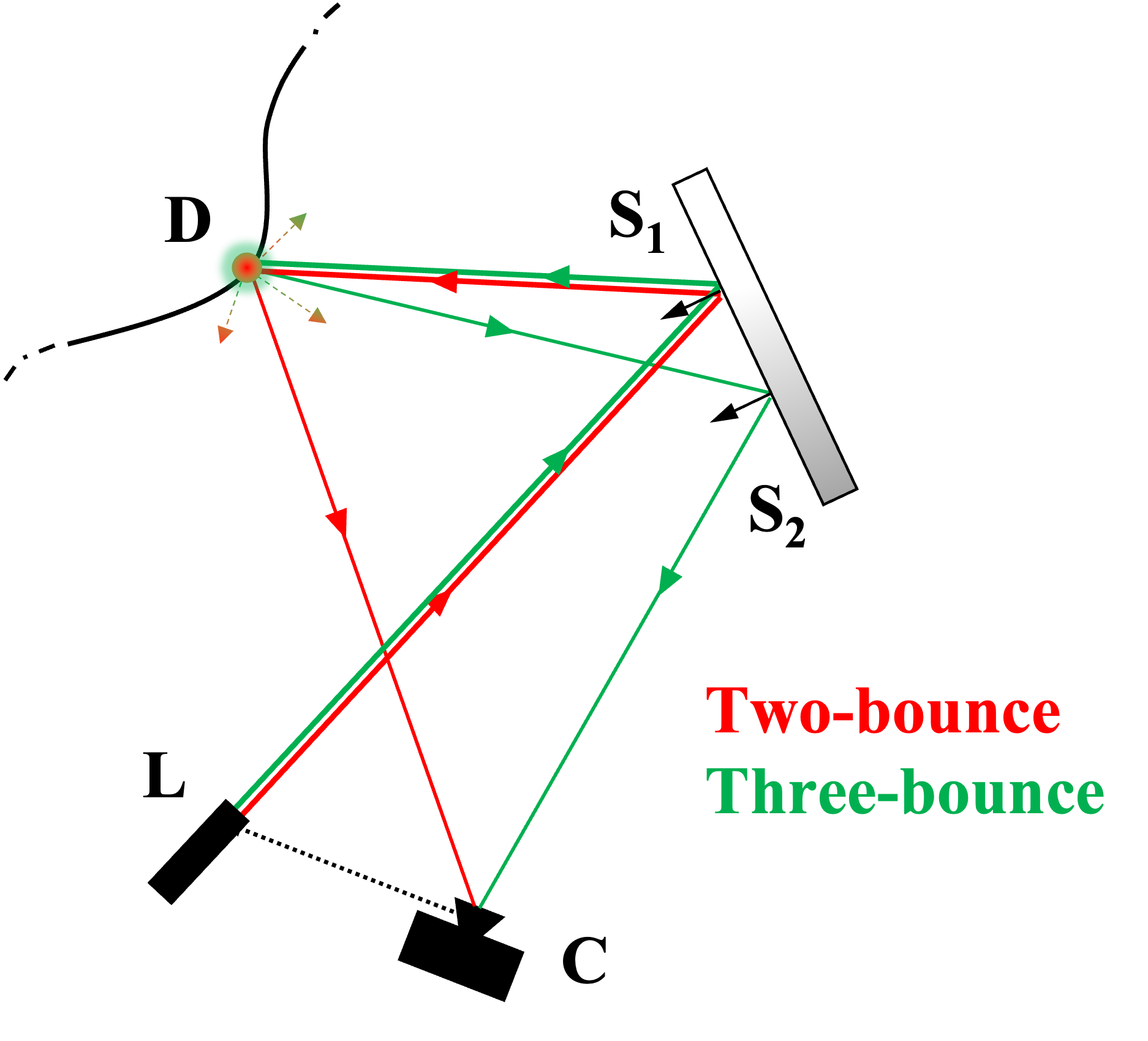
Tzofi Klinghoffer, Xiaoyu Xiang*, Siddharth Somasundaram*, Yuchen Fan, Christian Richardt, Ramesh Raskar, Rakesh Ranjan CVPR 2024 (Oral ~0.8% Acceptance) [project page] [video] [code] [data] [paper] Single-view occlusion-aware 3D reconstruction using two-bounce LiDAR. |

|
Siddharth Somasundaram, Akshat Dave, Connor Henley, Ashok Veeraraghavan, Ramesh Raskar CVPR 2023 [project page] [video] [code] [paper] LiDAR transients can reduce number of measurements needed for two-bounce non-line-of-sight imaging. |
|
Connor Henley, Siddharth Somasundaram, Joseph Hollmann, Ramesh Raskar Optics Express 2023 [project page] [code] [paper] Detect and map specular surfaces using angle-of-arrival and time-of-flight of light. |
|
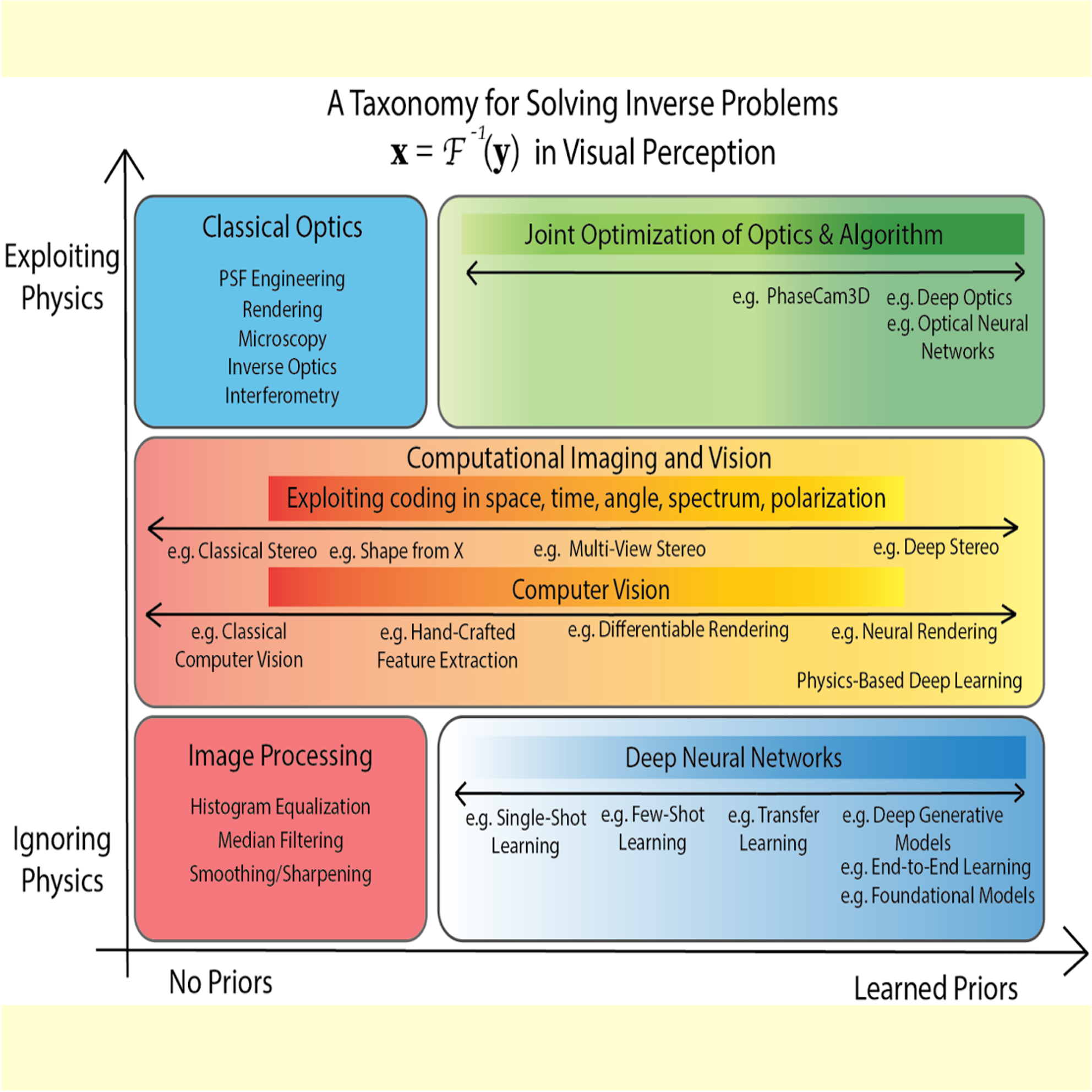
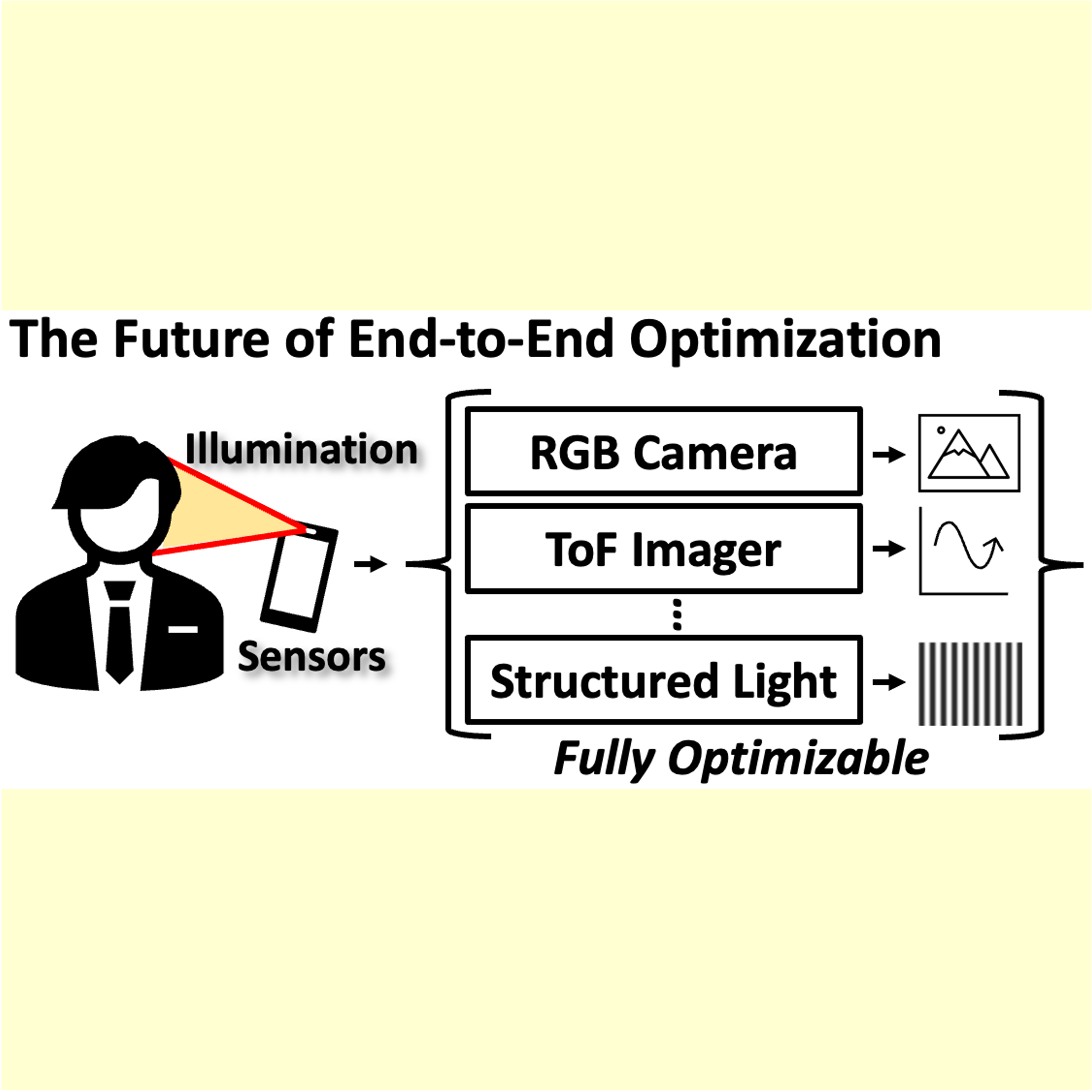
Tzofi Klinghoffer*, Siddharth Somasundaram*, Kushagra Tiwary*, Ramesh Raskar ICCP 2022 [video] [paper] Review perspective on convergence of computational imaging, end-to-end optimization, and physics-based machine learning for imaging system design. |
|
The source code for this website was adapted from the website of Dr. Jon Barron. |